
კამერის მოდულის ძირითადი სტრუქტურა
I. კამერის სტრუქტურა და მუშაობის პრინციპი
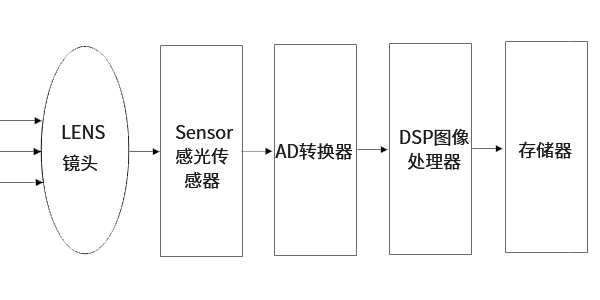
სცენა გადაღებულია ლინზიდან, წარმოქმნილი ოპტიკური გამოსახულება პროეცირდება სენსორზე, შემდეგ კი ოპტიკური გამოსახულება გარდაიქმნება ელექტრულ სიგნალად, რომელიც გარდაიქმნება ციფრულ სიგნალად ანალოგური ციფრული გადაყვანის გზით.ციფრული სიგნალი მუშავდება DSP-ის მიერ და შემდეგ იგზავნება კომპიუტერში დასამუშავებლად და ბოლოს გარდაიქმნება სურათად, რომელიც ჩანს ტელეფონის ეკრანზე.
ციფრული სიგნალის დამუშავების (DSP) ჩიპის ფუნქცია: ციფრული გამოსახულების სიგნალის პარამეტრების ოპტიმიზაცია რთული მათემატიკური ალგორითმების სერიის მეშვეობით და დამუშავებული სიგნალების გადაცემა კომპიუტერებზე და სხვა მოწყობილობებზე USB და სხვა ინტერფეისების საშუალებით.DSP სტრუქტურის ჩარჩო:
1, ISP (გამოსახულების სიგნალის პროცესორი)
1. ISP (გამოსახულების სიგნალის პროცესორი)
2, JPEG შიფრატორი
2. JPEG შიფრატორი
3, USB მოწყობილობის კონტროლერი
3. USB მოწყობილობის კონტროლერი
არსებობს ორი ტიპის საერთო კამერის სენსორები,
ერთი არის CCD (Chagre Couled Device) სენსორი, ანუ დამუხტვის დაწყვილებული მოწყობილობა.
მეორე არის CMOS (დამატებითი ლითონის ოქსიდის ნახევარგამტარი) სენსორი, ანუ დამატებითი ლითონის ოქსიდის ნახევარგამტარი.
CCD-ის უპირატესობა მდგომარეობს გამოსახულების კარგ ხარისხში, მაგრამ წარმოების პროცესი რთულია, ღირებულება მაღალია და ენერგიის მოხმარება მაღალია.იმავე გარჩევადობით, CMOS უფრო იაფია ვიდრე CCD, მაგრამ სურათის ხარისხი დაბალია ვიდრე CCD.CCD-თან შედარებით, CMOS გამოსახულების სენსორს აქვს ენერგიის დაბალი მოხმარება.გარდა ამისა, პროცესის ტექნოლოგიის წინსვლასთან ერთად, CMOS-ის გამოსახულების ხარისხიც მუდმივად გაუმჯობესდა.ამიტომ, ბაზარზე არსებული მობილური ტელეფონების ამჟამინდელი კამერები ყველა იყენებს CMOS სენსორებს.
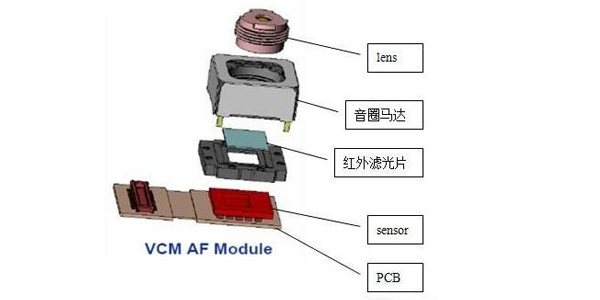
მობილური ტელეფონის კამერის მარტივი სტრუქტურა
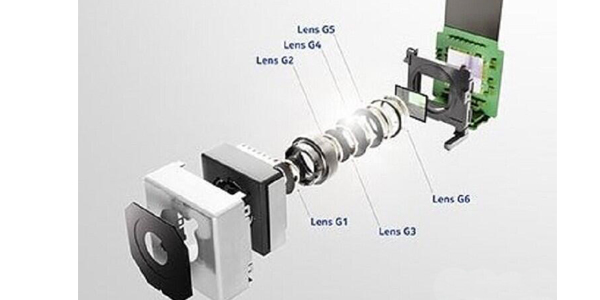
ობიექტივი: შეაგროვეთ სინათლე და გადაიტანეთ სცენა გამოსახულების საშუალების ზედაპირზე.
გამოსახულების სენსორი: გამოსახულების საშუალება, რომელიც ლინზების მიერ ზედაპირზე გამოსახულ სურათს (მსუბუქ სიგნალს) გარდაქმნის ელექტრო სიგნალად.
ძრავა: მართავს ლინზის მოძრაობას ისე, რომ ობიექტივი ასახავს მკაფიო სურათს გამოსახულების საშუალო ზედაპირზე.
ფერის ფილტრი: ადამიანის თვალით დანახული სცენა ხილული სინათლის ზოლშია და გამოსახულების სენსორს შეუძლია უფრო მეტად ამოიცნოს სინათლის ზოლი, ვიდრე ადამიანის თვალი.ამიტომ, ფერადი ფილტრი ემატება ზედმეტი სინათლის ზოლის გასაფილტრად, რათა გამოსახულების სენსორმა შეძლოს თვალით დანახული რეალური სცენების გადაღება.
ძრავის წამყვანი ჩიპი: გამოიყენება ძრავის მოძრაობის გასაკონტროლებლად და ლინზების გასაკონტროლებლად ავტოფოკუსის მისაღწევად.
მიკროსქემის დაფის სუბსტრატი: გადასცეს გამოსახულების სენსორის ელექტრული სიგნალი უკანა მხარეს.
II.დაკავშირებული პარამეტრები და არსებითი სახელები
1. გამოსახულების საერთო ფორმატები
1.1 RGB ფორმატი:
ტრადიციული წითელი, მწვანე და ლურჯი ფორმატი, როგორიცაა RGB565 და RGB888;16-ბიტიანი მონაცემთა ფორმატი არის 5-bit R + 6-bit G + 5-bit B. G-ს აქვს კიდევ ერთი ბიტი, რადგან ადამიანის თვალები უფრო მგრძნობიარეა მწვანეზე.
1.2 YUV ფორმატი:
Luma (Y) + chroma (UV) ფორმატი.YUV ეხება პიქსელის ფორმატს, რომელშიც შუქის პარამეტრი და ქრომინანტობის პარამეტრი გამოიხატება ცალ-ცალკე.ამ განცალკევების უპირატესობა ის არის, რომ ის არა მხოლოდ თავიდან აიცილებს ორმხრივ ჩარევას, არამედ ამცირებს ქრომის შერჩევის სიჩქარეს სურათის ხარისხზე ზედმეტი ზემოქმედების გარეშე.YUV უფრო ზოგადი ტერმინია.მისი სპეციფიკური მოწყობისთვის ის შეიძლება დაიყოს მრავალ კონკრეტულ ფორმატად.
Chroma (UV) განსაზღვრავს ფერის ორ ასპექტს: შეფერილობას და გაჯერებას, რომლებიც წარმოდგენილია შესაბამისად CB და CR.მათ შორის, Cr ასახავს განსხვავებას RGB შეყვანის სიგნალის წითელ ნაწილსა და RGB სიგნალის სიკაშკაშის მნიშვნელობას შორის, ხოლო Cb ასახავს განსხვავებას RGB შეყვანის სიგნალის ლურჯ ნაწილსა და RGB სიგნალის სიკაშკაშის მნიშვნელობას შორის.
შერჩევის ძირითადი ფორმატებია YCbCr 4:2:0, YCbCr 4:2:2, YCbCr 4:1:1 და YCbCr 4:4:4.
1.3 RAW მონაცემთა ფორმატი:
RAW გამოსახულება არის ნედლეული მონაცემები, რომლითაც CMOS ან CCD გამოსახულების სენსორი გარდაქმნის დაჭერილ სინათლის წყაროს სიგნალს ციფრულ სიგნალად.RAW ფაილი არის ფაილი, რომელიც იწერს ციფრული კამერის სენსორის თავდაპირველ ინფორმაციას და კამერის მიერ გენერირებულ ზოგიერთ მეტამონაცემებს (როგორიცაა ISO პარამეტრები, ჩამკეტის სიჩქარე, დიაფრაგმის მნიშვნელობა, თეთრი ბალანსი და ა.შ.).RAW არის დაუმუშავებელი და შეუკუმშული ფორმატი და ის შეიძლება კონცეპტუალირებული იყოს, როგორც "ნედლი გამოსახულების კოდირებული მონაცემები" ან უფრო ნათლად ეწოდოს "ციფრული ნეგატივი".სენსორის თითოეული პიქსელი შეესაბამება ფერის ფილტრს და ფილტრები ნაწილდება ბაიერის ნიმუშის მიხედვით.თითოეული პიქსელის მონაცემები პირდაპირ გამოდის, კერძოდ, RAW RGB მონაცემები
Raw მონაცემები (Raw RGB) ხდება RGB ფერის ინტერპოლაციის შემდეგ.
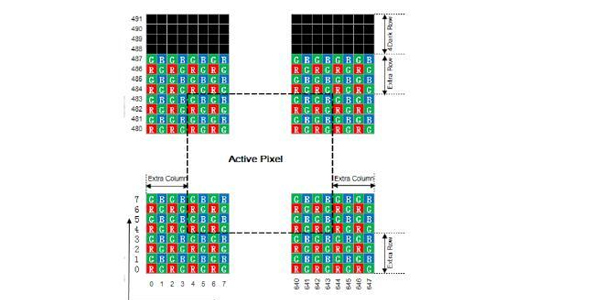
RAW ფორმატის სურათის მაგალითი
2. დაკავშირებული ტექნიკური მაჩვენებლები
2.1 გამოსახულების გარჩევადობა:
SXGA (1280 x1024), 1.3 მეგაპიქსელი
XGA (1024 x768), 0.8 მეგაპიქსელი
SVGA (800 x600), 0.5 მეგაპიქსელი
VGA (640x480), 0.3 მეგაპიქსელი (0.35 მეგაპიქსელი ეხება 648X488)
CIF (352x288), 0.1 მეგაპიქსელი
SIF/QVGA (320x240)
QCIF (176x144)
QSIF/QQVGA (160x120)
2.2 ფერის სიღრმე (ფერი ბიტების რაოდენობა):
256 ფერის ნაცრისფერი შკალა, 256 სახის ნაცრისფერი (შავისა და თეთრის ჩათვლით).
15 ან 16 ბიტიანი ფერი (მაღალი ფერი): 65,536 ფერი.
24-ბიტიანი ფერი (ნამდვილი ფერი): თითოეულ ძირითად ფერს აქვს 256 დონე და მათ კომბინაციას აქვს 256*256*256 ფერი.
32-ბიტიანი ფერი: გარდა 24-ბიტიანი ფერისა, დამატებითი 8 ბიტი გამოიყენება გადახურვის ფენის (ალფა არხის) გრაფიკული მონაცემების შესანახად.
2.3 ოპტიკური ზუმი და ციფრული ზუმი:
ოპტიკური მასშტაბირება: გაადიდეთ/შეამცირეთ ობიექტი, რომლის გადაღებაც გსურთ ლინზის რეგულირებით.ის ინარჩუნებს პიქსელებს და გამოსახულების ხარისხს ძირითადად უცვლელად, მაგრამ თქვენ შეგიძლიათ გადაიღოთ იდეალური სურათი.ციფრული ზუმი: რეალურად ზუმი არ არის.ის უბრალოდ იღებს ორიგინალურ სურათს და მასშტაბირებს. რასაც ხედავთ LCD ეკრანზე გადიდებულია, მაგრამ სურათის ხარისხი არსებითად არ არის გაუმჯობესებული და პიქსელები უფრო დაბალია, ვიდრე მაქსიმალური პიქსელი, რომლის გადაღებაც თქვენს კამერას შეუძლია.სურათის ხარისხი ძირითადად უღირსია, მაგრამ მას შეუძლია გარკვეული მოხერხებულობის უზრუნველყოფა.
2.4 სურათის შეკუმშვის მეთოდი:
JPEG/M-JPEG
H.261/H.263
MPEG
H.264
2.5 გამოსახულების ხმაური:
ეს ეხება სურათზე არსებულ ხმაურს და ჩარევას და ჩნდება როგორც ფიქსირებული ფერის ხმაური გამოსახულებაში.
2.6 ავტომატური თეთრი ბალანსი:
მარტივად რომ ვთქვათ: თეთრი ობიექტების აღდგენა კამერით.დაკავშირებული ცნებები: ფერის ტემპერატურა.
2.7 ხედვის კუთხე:
მას აქვს იგივე პრინციპი, როგორც ადამიანის თვალის გამოსახულება, რომელიც ასევე ცნობილია როგორც გამოსახულების დიაპაზონი.
2.8 ავტომატური ფოკუსი:
ავტოფოკუსი შეიძლება დაიყოს ორ კატეგორიად: ერთი არის დისტანციური ავტოფოკუსი, რომელიც ეფუძნება ობიექტივსა და საგანს შორის მანძილს, ხოლო მეორე არის ფოკუსის ამოცნობის ავტოფოკუსი, რომელიც ეფუძნება ფოკუსირების ეკრანზე მკაფიო გამოსახულებას (სიმკვეთრის ალგორითმი).
შენიშვნა: მასშტაბირება არის შორეული ობიექტების მიახლოება.ფოკუსირება არის გამოსახულების გარკვევა.
2.9 ავტომატური ექსპოზიცია და გამა:
ეს არის დიაფრაგმის და ჩამკეტის კომბინაცია.დიაფრაგმა, ჩამკეტის სიჩქარე, ISO.გამა არის ადამიანის თვალის რეაგირების მრუდი სიკაშკაშეზე.
III.კამერის სხვა სტრუქტურა

3.1 ფიქსირებული ფოკუსის კამერის სტრუქტურა
3.2 ოპტიკური გამოსახულების სტაბილიზაციის კამერის სტრუქტურა

3.3 MEMS კამერა
გამოქვეყნების დრო: მაისი-28-2021




